
Recherche
Filtre actif, cliquez pour en enlever un tag :
Cliquez sur un tag pour affiner votre recherche :
Résultat de la recherche (4 notes) :
J'ai créé fedora-rpm-copr-playground pour apprendre à publier des packages RPM sur Fedora COPR
Introduction
Après trois ans à repousser ce projet, je me suis enfin lancé en janvier 2026 dans la création de paquets RPM pour Fedora COPR.
J'ai créé et publié les packages aichat-git (repository) et text-to-audio (repository). L'expérience a été beaucoup plus simple et rapide que je le pensais. Les agents IA simplifient certes ce genre de tâche, mais même sans eux, le code reste plutôt minimaliste.
Pourquoi est-ce que je me suis intéressé à ce sujet ? Au départ, c'était pour distribuer qemu-compose sous forme de package RPM (voir issue).
Pour bien maîtriser ces opérations, la semaine dernière, je suis reparti de zéro et j'ai implémenté et publié le playground : fedora-rpm-copr-playground. Voici les objectifs de ce playground :
- Générer un package pour distribuer un simple script Bash qui affiche un "Hello world" (dans la branche
bash). - Générer un package pour distribuer une application Golang qui affiche un "Hello world" (dans la branche
golang)
Pour chacun de ces packages, j'ai testé trois méthodes de build :
- build du package RPM 100% local
- build du package SRPM en local, puis upload sur Fedora COPR qui génère les RPM pour plusieurs plateformes et architectures (x86_64, aarch64, etc.)
- une méthode basée à 100% sur Fedora COPR à partir des sources d'un dépôt GitHub, déclenchée automatiquement par un script GitHub Actions
Cette note documente ce playground et rassemble les difficultés que j'ai rencontrées. Le README.md reste consultable si vous préférez suivre un exemple pas à pas.
Le fichier .spec
Le point central pour créer un package RPM est le fichier .spec /rpm/hello-bash.spec :
#
Name: hello-bash
Version: 1.0.7
Release: 1%{?dist}
Summary: A simple Hello World bash script
License: MIT
URL: https://github.com/stephane-klein/fedora-rpm-copr-playground
Source0: hello-bash
BuildArch: noarch
%description
A simple "Hello World" Bash script packaged as an RPM for Fedora COPR.
%prep
# Nothing to prepare, source is ready
%build
# Nothing to build, it's a bash script
%install
mkdir -p %{buildroot}/%{_bindir}
cp %{SOURCE0} %{buildroot}/%{_bindir}/hello-bash
chmod 755 %{buildroot}/%{_bindir}/hello-bash
%files
%{_bindir}/hello-bash
%changelog
* Thu Mar 19 2026 Stéphane Klein <contact@stephane-klein.info> - 1.0.0-1
- Initial release
Les lignes importantes dans ce fichier :
BuildArch: noarch, étant donnée que c'est un simple script, ce package n'est pas dépendant de l'architecture (processeur).- La section
%install - La section
%files
La syntaxe du format .spec peut sembler étrange en 2026. Elle date de 1995 — avant même l'existence de YAML (2001) et JSON (1999). Cette ancienneté explique les %... et %{...} qui peuvent paraitre cryptiques aujourd'hui.
Historiquement, le champ Source0 pointe vers une archive (généralement un tar.gz), contenant les sources du projet. Pour des cas simples, comme ici avec le script Bash, Source0 peut directement référencer le fichier source.
J'ai aussi implémenté une variante bash-multifiles dans le playground, pour tester le packaging de plusieurs scripts accompagnés d'un fichier de documentation. J'y indique les fichiers via Source0:, Source1:, Source2:, puis je les copie dans %install avec %{SOURCE0}, %{SOURCE1}, %{SOURCE2}. Cela fonctionne correctement, bien qu'au-delà de trois ou quatre fichiers, je pense qu'il soit probablement plus pratique d'utiliser une archive.
Build local du package RPM
Le script /build.sh suivant permet de générer un package RPM :
#!/bin/bash
set -e
TOPDIR="$(pwd)/rpmbuild"
mkdir -p "$TOPDIR"/{BUILD,RPMS,SRPMS,SOURCES,SPECS}
echo "Copying source to SOURCES..."
cp hello-bash "$TOPDIR/SOURCES/"
echo "Building RPM..."
rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-bash.spec
echo ""
echo "Build complete!"
echo "RPM: $TOPDIR/RPMS/noarch/"
Il commence par préparer la structure de dossier suivante :
/rpmbuild/
├── BUILD
├── RPMS
├── SOURCES
├── SPECS
└── SRPMS
Ensuite les fichiers à packager sont copiés dans rpmbuild/SOURCES
/rpmbuild/
├── BUILD
├── RPMS
├── SOURCES
│ ├── hello-bash
├── SPECS
└── SRPMS
Pour finir, la commande rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-bash.spec génère à la fois le package SRPM (source RPM) et le RPM binaire. L'option -ba signifie "build all". Pour générer uniquement le SRPM, il faudrait utiliser -bs (build source). Ici, comme le package contient un script Bash, il est de type noarch :
/rpmbuild/
├── BUILD
├── RPMS
│ └── noarch
│ └── hello-bash-1.0.7-1.fc42.noarch.rpm
├── SOURCES
│ ├── hello-bash
├── SPECS
└── SRPMS
└── hello-bash-1.0.7-1.fc42.src.rpm
Publication sur Fedora COPR
Le playground contient un second script qui permet de publier le package sur Fedora COPR, ce qui permet de rendre accessible publiquement son package.
Voici comment cette méthode fonctionne. Tout d'abord, il faut créer un compte et un projet sur Fedora COPR. Dans le playground, j'ai implémenté le script init-copr-project.sh basé sur copr-cli, qui me permet d'automatiser la création du projet (paradigme GitOps).
$ copr-cli create "hello-bash" \
--description "A simple Hello World Bash script packaged as an RPM (auto-build on tags)" \
--chroot fedora-42-x86_64 \
--chroot fedora-43-x86_64 \
--chroot fedora-44-x86_64
Dans cet exemple, je demande à COPR de builder les packages du projet pour les distributions fedora-42-x86_64, fedora-43-x86_64, fedora-44-x86_64.
Après avoir configuré le projet COPR, je lance le script /build-copr.sh qui exécute :
copr-cli build "hello-bash" /rpmbuild/SRPMS/hello-bash-1.0.6-1.fc42.src.rpm
Le premier paramètre "hello-bash" est le nom du projet et le second est le package source SRPM préalablement construit localement par le script /build.sh.
Voici ce que donne l'exécution de ./build-copr.sh côté cli :
$ ./build-copr.sh
...
Build complete!
RPM: /home/stephane/git/github.com/stephane-klein/fedora-rpm-copr-playground/.worktree/bash/rpmbuild/RPMS/noarch/
Uploading package ./rpmbuild/SRPMS/hello-bash-1.0.6-1.fc42.src.rpm
|################################| 8.5 kB 47.1 kB/s eta 0:00:00
Build was added to hello-bash:
https://copr.fedorainfracloud.org/coprs/build/10252699
Created builds: 10252699
Watching build(s): (this may be safely interrupted)
08:59:15 Build 10252699: pending
08:59:45 Build 10252699: running
09:00:15 Build 10252699: starting
09:00:46 Build 10252699: running
Voici ce qui est visible sur l'interface web de COPR, https://copr.fedorainfracloud.org/coprs/stephaneklein/hello-bash/builds/ :
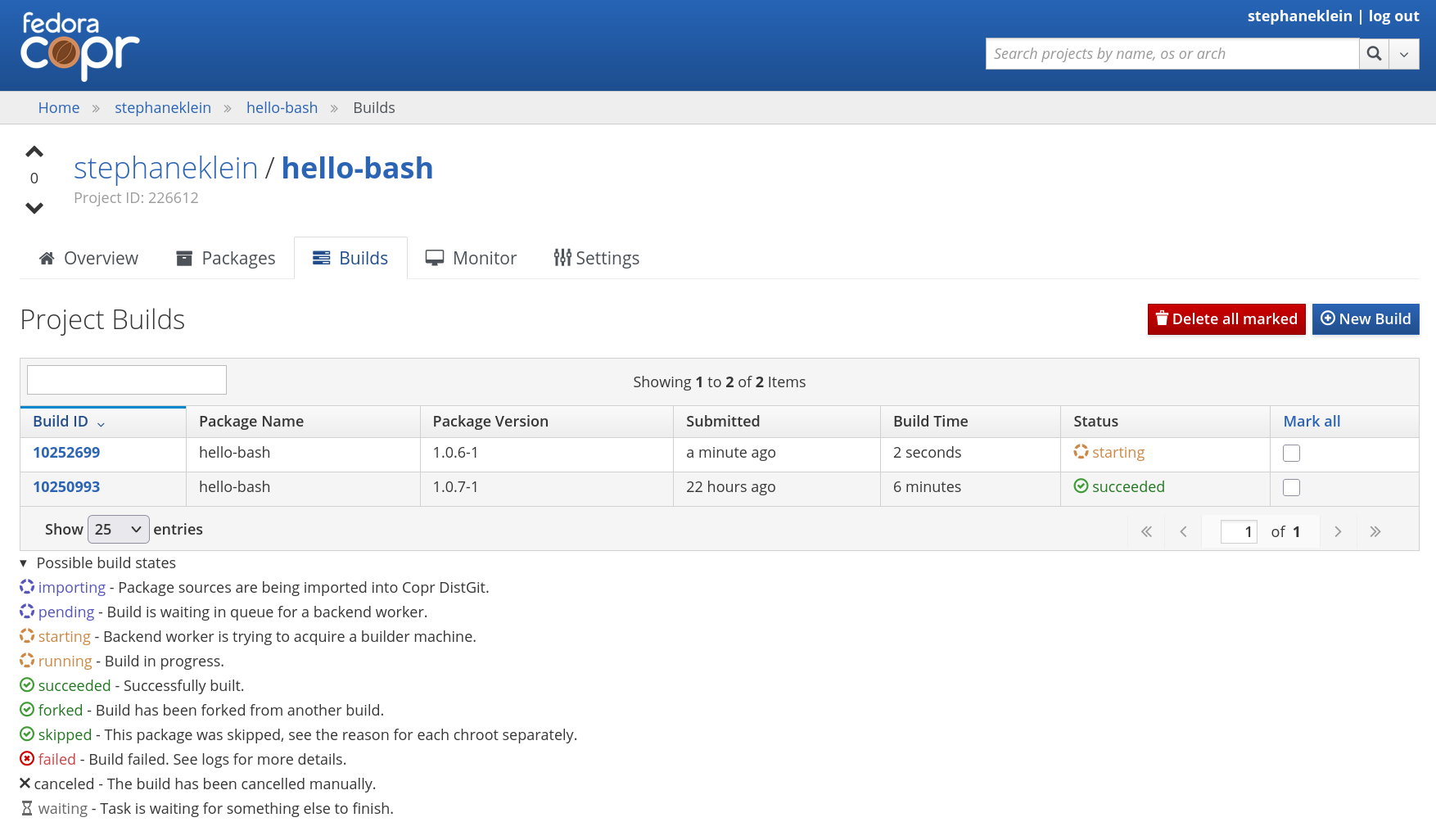
Une fois le build des packages terminé, il est facile d'installer le package avec les commandes suivantes :
$ sudo dnf copr enable -y stephaneklein/hello-bash
$ sudo dnf install -y hello-bash
$ hello-bash
Hello World
Automatisation GitOps avec COPR
Et pour finir, j'ai implémenté dans le playground l'automatisation complète de la compilation et publication des packages sur l'infrastructure COPR.
Pour cela, dans le script init-copr-project.sh j'ai déclaré l'URL du repository qui contient le code source :
...
copr-cli add-package-scm "$COPR_PROJECT" \
--name hello-bash \
--clone-url https://github.com/stephane-klein/fedora-rpm-copr-playground.git \
--commit bash \
--subdir . \
--spec rpm/hello-bash.spec \
--type git \
--method make_srpm \
--webhook-rebuild on
Le paramètre --commit bash permet de définir la branche Git à utiliser comme source.
Le paramètre --method make_srpm, qui permet à l'utilisateur d'utiliser un script personnalisé de génération du SRPM, à placer dans /.copr/Makefile à la racine du dépôt avec une cible srpm, exemple :
specfile = rpm/hello-bash.spec
.PHONY: srpm
srpm: $(specfile)
mkdir -p /tmp/copr-srpm-build
cp rpm/hello-bash.spec /tmp/copr-srpm-build/hello-bash.spec
cp -r . /tmp/copr-srpm-build/source/
cd /tmp/copr-srpm-build && \
rpmbuild -bs hello-bash.spec \
--define "_topdir /tmp/copr-srpm-build/rpmbuild" \
--define "dist .fc42" \
--define "_sourcedir /tmp/copr-srpm-build/source"
cp /tmp/copr-srpm-build/rpmbuild/SRPMS/*.src.rpm $(outdir)
Je ne souhaite pas détailler ici d'autres méthodes comme tito ou Packit, mais la méthode make_srpm est la plus flexible, elle permet de contrôler entièrement comment le SRPM est construit.
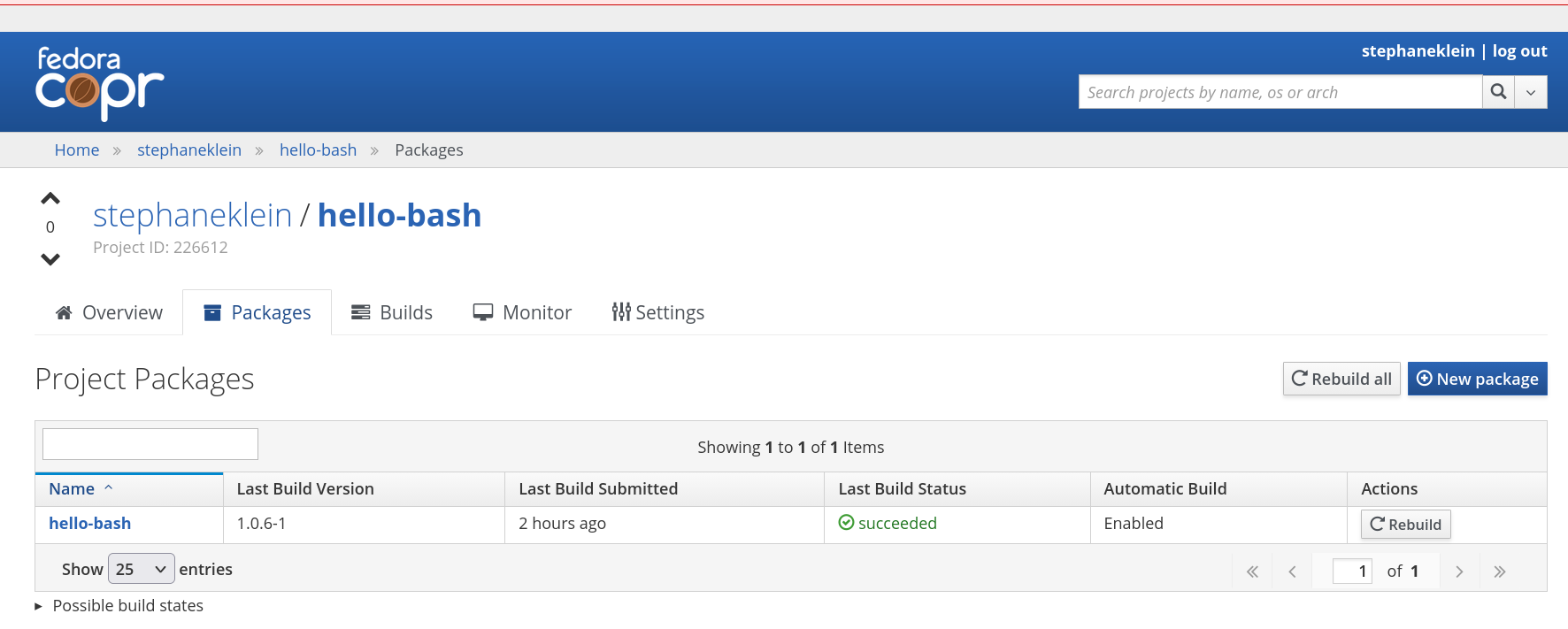
Une fois tout ceci configuré, il est possible de rebuild le package directement en cliquant sur le bouton "Rebuild" sur l'interface web de COPR :
Dernière étape : j'ai implémenté un build automatique qui est déclenchée par un appel curl dans le job GitHub Actions /.github/workflows/trigger-copr-build.yml, dont voici le contenu :
name: Trigger Copr Build
on:
push:
tags:
- '*'
jobs:
trigger-copr-build:
runs-on: ubuntu-latest
steps:
- uses: actions/checkout@v4
with:
fetch-depth: 0
- name: Verify tag is on bash branch
run: |
if ! git branch -r --contains ${{ github.ref_name }} | grep -q "origin/bash"; then
echo "Tag ${{ github.ref_name }} is not on branch bash"
exit 1
fi
- name: Trigger Copr webhook
run: |
curl -X POST https://copr.fedorainfracloud.org/webhooks/custom/226325/3cf20247-820b-4050-bfb1-593b01a6996f/hello-bash/
Ce job est exécuté à chaque publication d'un nouveau Git tag, suivi d'une vérification que le tag provient bien de la branche bash.
Claude Sonnet 4.6 m'a suggéré l'existence d'une méthode de polling de dépôt Git intégrée à COPR, mais je n'ai trouvé aucune trace de celle-ci dans la documentation.
J'ai aussi essayé d'utiliser la méthode basée sur les webhooks GitHub de COPR, mais je n'ai pas réussi à la faire fonctionner. L'interface de GitHub m'indiquait à chaque fois une erreur dans la réponse des calls HTTP. C'est pour cela que j'ai fini par déclencher le webhook custom via un job GitHub Actions.
Package d'un projet en Golang
Le playground contient aussi le packaging d'une application en Golang, consultable dans la branche golang.
Voici le contenu du fichier /golang/rpm/hello-golang.spec :
Name: hello-golang
Version: 1.0.10
Release: 1%{?dist}
Summary: A simple Hello World Go application
License: MIT
URL: https://github.com/stephane-klein/fedora-rpm-copr-playground
Source0: %{name}-%{version}.tar.gz
BuildRequires: golang >= 1.21
%description
A simple "Hello World" Go application packaged as an RPM for Fedora COPR.
%prep
%autosetup
%build
go build -ldflags "-X main.version=%{version}" -o %{name}
%install
mkdir -p %{buildroot}%{_bindir}
cp %{name} %{buildroot}%{_bindir}/
%files
%{_bindir}/%{name}
%changelog
* Fri Mar 20 2026 Stéphane Klein <contact@stephane-klein.info> - 1.0.0-1
- Initial release
Les principales différences avec la version pour Bash :
- Absence de
BuildArch: noarch - Présence de
BuildRequires: golang >= 1.21 - Et l'ajout des instructions suivantes :
%prep
%autosetup
%build
go build -ldflags "-X main.version=%{version}" -o %{name}
Peu de changement au niveau du script /build-rpm-locally.sh, qui génère ces fichiers :
rpmbuild
├── BUILD
├── RPMS
│ └── x86_64
│ ├── hello-golang-1.0.10-1.fc42.x86_64.rpm
│ ├── hello-golang-debuginfo-1.0.10-1.fc42.x86_64.rpm
│ └── hello-golang-debugsource-1.0.10-1.fc42.x86_64.rpm
├── SOURCES
│ ├── hello-golang-1.0.10
│ │ ├── go.mod
│ │ └── main.go
│ └── hello-golang-1.0.10.tar.gz
├── SPECS
└── SRPMS
└── hello-golang-1.0.10-1.fc42.src.rpm
Cette fois, plus rien dans le dossier RPMS/noarch/, la commande rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-golang.spec build le package pour la distribution de la workstation du développeur.
Pour le reste, je n'ai pas identifié de différence majeure entre la version Bash et la version Golang
La suite… méthode Tito et Packit
Pour être tout à fait transparent, en rédigeant cette note, j'ai découvert les méthodes tito et Packit.
Je compte mettre à jour stephane-klein/fedora-rpm-copr-playground pour les tester et ensuite publier une nouvelle note de compte rendu.
Comment j'ai perdu ma discipline en décembre et janvier
Jusqu'à mi-décembre 2025, cela faisait environ 2 ans que j'arrivais à rester concentré sur un sujet à la fois. J'avais réussi à éviter de papillonner d'un sujet à l'autre. Pour moi, un sujet n'est vraiment terminé que lorsque j'ai publié la note correspondante.
Le dernier sujet que j'avais exploré avec succès était mon étude de Fedora CoreOS.
Je me suis ensuite lancé dans l'étude pratique approfondie de Podman Quadlets. J'ai réussi à publier coreos-quadlet-playground, mais avant même d'avoir commencé à rédiger ma note de synthèse, j'ai perdu ma discipline.
Dans cette note, je vais tenter d'expliquer comment et pourquoi j'ai "dérapé" et faire un bilan des side-projects sur lesquels j'ai papillonné pendant ces deux derniers mois (depuis mi-décembre).
Lors de mon travail sur Podman Quadlets, j'ai découvert comment ce projet utilise avec élégance systemd-run et le mécanisme des generators (systemd-run-generator) de systemd pour incarner la philosophie Unix.
Suite à cette découverte, j'ai repensé aux scripts manuels que j'utilisais ces derniers mois pour lancer mes VM QEMU. Exemple : up-qemu-vm.sh. Je me suis dit qu'il serait élégant de lancer des VM QEMU de la même manière que Podman Quadlets.
Je n'ai pas réussi à résister à cette idée. Le 10 décembre au soir, je me suis dit que j'allais consacrer une petite heure à tester cette idée via du vibe coding avec Aider et Claude Sonnet 4.5.
Cette heure s'est transformée en 12h de session non-stop. J'ai réussi à publier une première version de qemu-compose, mais je venais de rompre ma discipline : je n'avais toujours pas écrit ma note sur Podman Quadlets.
Depuis, je n'ai pas réussi à retrouver ma discipline. Je suis tombé dans une spirale de papillonnage qui a duré deux mois 🙈.
En rédigeant cette note, j'ai essayé de comprendre pourquoi j'avais dérapé.
Je pense que c'était la combinaison de plusieurs facteurs :
- Le déclencheur : Ma première expérience réelle de vibe coding sur un projet complet. Cette expérience m'a tellement excité et en même temps tellement perturbé que j'ai perdu la motivation de rédiger ma note sur Podman Quadlets.
- La cascade : Une fois le premier écart fait, l'effet "What the hell" s'est enclenché : mon cerveau a rationalisé la continuation du comportement déviant par un "de toute façon, c'est déjà foutu, autant continuer".
- Le contexte : J'étais dans une période de stress et de frustration. L'illusion de toute-puissance qu'offrent les derniers modèles 4.5 d'Anthropic — obtenir des résultats rapides — m'a poussé dans une fuite en avant, un échappatoire pour combler mes frustrations du moment.
Depuis 2 ans, j'utilise trois garde-fous (circuit breakers) pour m'empêcher de démarrer un nouveau projet sans avoir terminé le précédent — autrement dit, pour éviter de papillonner et de survoler les sujets :
- Je tracke toutes mes activités via Toggl. Quand je démarre une activité, je lance consciemment le chronomètre. Cette friction me force à nommer ce que je fais et à rester conscient du temps que j'y consacre. C'est un premier filtre contre les distractions impulsives.
- Tous les matins, je rédige mes todo lists pro et perso dans Obsidian. L'élément clé est une section "Je ne veux pas faire" où je liste explicitement les tâches tentantes mais hors priorité. C'est mon exutoire pour les idées qui me donnent envie sans pour autant y céder.
- La publication de notes sur notes.sklein.xyz me force à définir ma "Definition of Done". Une itération (un sujet) n'est terminée que quand la note est publiée.
En analysant mes notes, je constate que j'ai progressivement abandonné la rédaction de mes todo lists quotidiennes à partir du 5 décembre — soit 5 jours avant mon dérapage sur qemu-compose.
Je pense que ce n'est pas un hasard.
#JaiDécidé de reprendre cette routine dès demain. C'est mon garde-fou le plus important.
Voici les sujets en vrac que j'ai survolés pendant ces 2 derniers mois — tous sans note de synthèse publiée :
- Réimplémentation complète de ma configuration chezmoi (inachevée)
- Développement de
gnome-settings-import-export
- Développement de
- Étude de timeshift et snapper
- Installation et configuration de netbird sur mes NUC
- Tentative d'installation de Kodi sur un de mes NUC (inachevée)
- Nouvelle configuration Neovim from scratch basée sur LazyVim (inachevée) :
lazyvim-playground - Migration de Fugitive vers Neogit
- Développement et publication du plugin
neo-tree-session.nvim - Étude puis abandon d'une migration Alacritty + tmux → wezterm (branche WIP)
- Étude puis abandon d'une migration Alacritty + tmux → kitty
- Étude d'une migration Alacritty → foot + tmux (en cours)
- Contribution au projet foot avec 2 Merge Requests :
- Test d'avante.nvim, notamment Avante Zen Mode — piste abandonnée
- Migration de Aider vers OpenCode
- Adoption de Jujutsu à la place de Git — utilisation quotidienne depuis plus d'un mois, progression continue mais pas encore fluide
Bilan : 13 explorations, 2 contributions open source, 1 plugin publié, 0 note de synthèse 😔.
En publiant cette note, je souhaite casser cet effet "What the hell".
Je vais sans doute accepter de ne pas publier de notes sur les sujets que j'ai abandonnés. Par contre, je souhaite à l'avenir publier des notes au sujet de :
Bilan de mon temps de travail de ma première année de Freelance
Après ma note "Retour XP posts LinkedIn et mes canaux d'acquisition de mission Freelance", voici ma seconde note bilan de ma première année d'activité Freelance.
En 2022, ma dernière année complète en CDI qui me sert de référence, j'ai travaillé 219 jours. Cette année-là, 6 jours fériés sur 10 sont tombés en semaine et j'ai pris en tout 35 jours de congé.
Pour ma première année de Freelance, du 1er juillet 2024 au 30 juin 2025 :
- J'ai travaillé l'équivalent de 206 journées complètes :
- J'ai facturé 168 jours de prestation
- À cela s'ajoute 39 journées complètes non facturées. Il s'agit soit de prestations supplémentaires que je n'ai pas facturées, soit du temps consacré à la prospection et aux échanges avec des prospects.
- 266 jours où j'ai travaillé plus de 30min
- 288 jours où j'ai travaillé au moins 1min
- 59 jours de vacances officielles, dont 18 qui sont tombés en weekend, donc j'ai posé l'équivalent de 41 jours de congés. Pendant ces 59 jours, j'ai au moins travaillé 18 jours durant plus de 30 minutes.
Si je fais le bilan, pour ma première année, j'ai travaillé 13 jours de moins que ma dernière année en CDI, pour un chiffre d'affaires qui correspond approximativement à un CDI à 75 K€ brut par an.
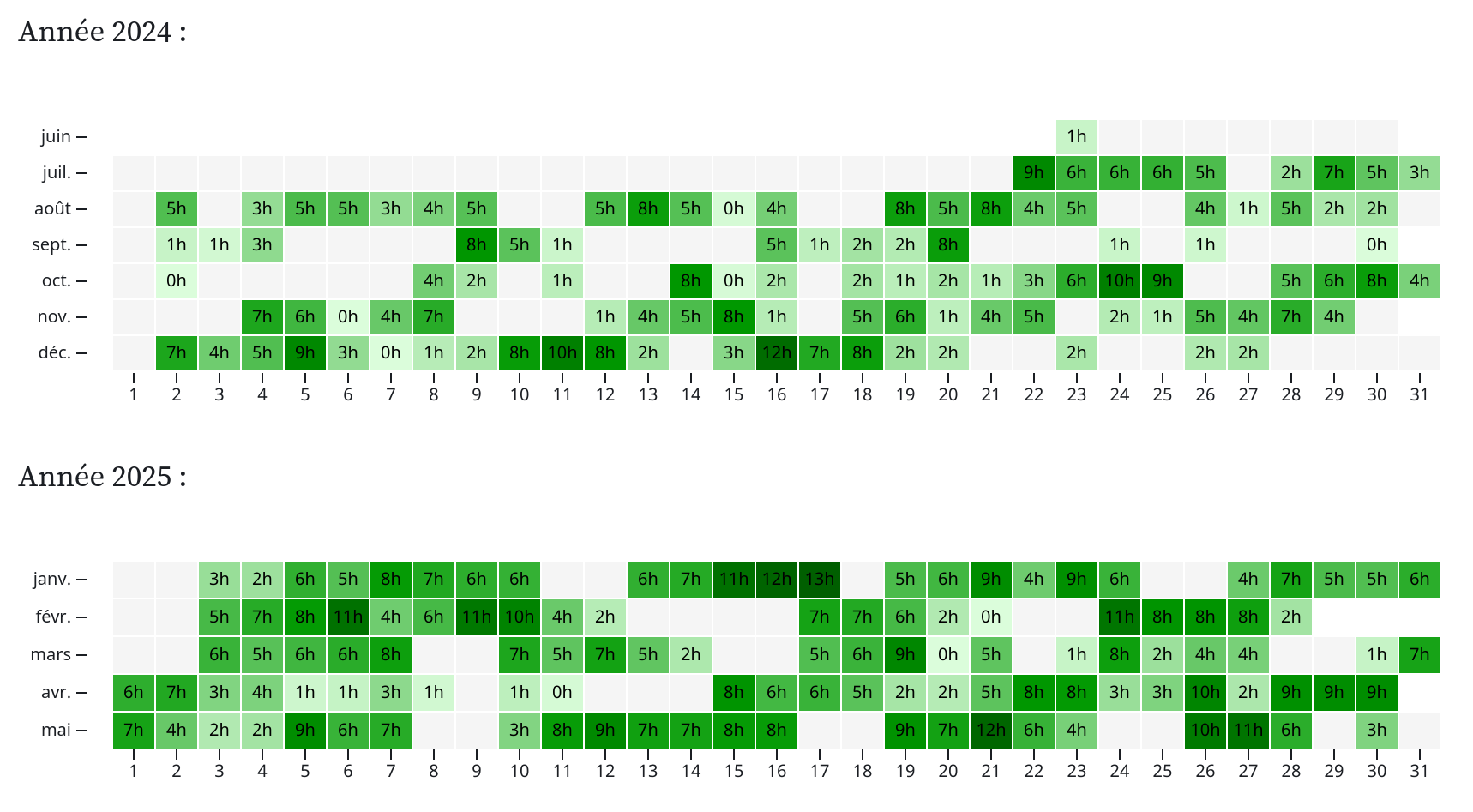
Répartition des jours que j'ai facturée de juillet 2024 à fin mai 2025 :
Retour XP posts LinkedIn et mes canaux d'acquisition de mission Freelance
J'ai prévu de publier quelques notes de bilan de ma première année d'activité Freelance. Voici la première, une note d'analyse de mes canaux d'acquisition de missions.
Il y a environ un an, fin septembre 2024, j'ai publié 3 posts sur LinkedIn dans le but de faire connaître ma nouvelle activité Freelance :
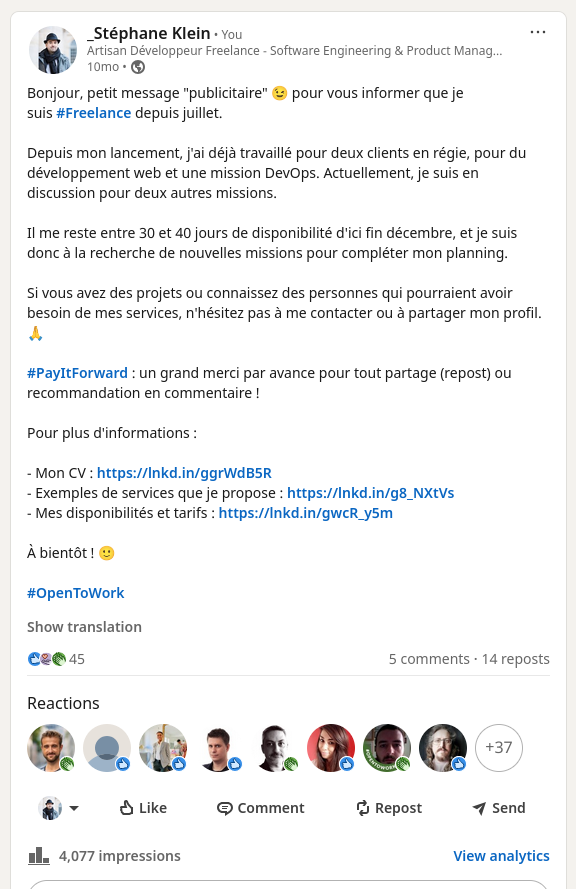
Bien que ces messages aient généré 78 réactions, 23 reposts et 7163 impressions cumulées, ils ne m'ont apporté aucune mission directe.
Cependant, j'ai observé qu'ils ont efficacement informé l'ensemble de mon réseau professionnel de ma nouvelle activité.
Malgré cet échec sur ce canal d'acquisition, j'ai tout de même facturé 168 jours de prestation sur une période de 12 mois, du 1er juillet 2024 (jour du dépôt légal de ma micro-entreprise) au 30 juin 2025, en utilisant d'autres approches d'acquisition client.
Voici la répartition de ces 168 jours selon le canal d'acquisition :
- Mon réseau direct, des anciens collègues très proches : 3 clients pour un total de 98 jours
- Des candidatures spontanées : 2 clients pour un total de 50 jours
- Recommandation indirecte d'un client qui n'était pas dans mon cercle de connaissance avant d'avoir travaillé avec lui : 1 client pour un total de 20 jours
Je n'ai reçu aucune proposition de mission sur Malt, pas même un message. Mon taux journalier de 700 € est peut-être trop élevé, ou alors c'est un problème de positionnement de profil. Je dois reconnaitre que je n'ai fait aucun effort à améliorer mon profil Malt depuis ma dernière phase d'optimisation présentée dans cette note du 25 septembre 2024.
Je n'ai répondu à aucune annonce de mission.
J'ai fait seulement deux candidatures spontanées et toutes les deux ont abouti.
Pour la première, j'ai ciblé un service que j'apprécie beaucoup et dont je suis client depuis presque 10 ans. J'avais repéré par leurs posts qu'ils avaient peut-être un budget pour des missions de développement.
Pour la seconde, j'ai visé un collectif que j'avais identifié il y a plus de 10 ans et pour lequel j'avais toujours eu envie de travailler.
Dans les deux cas, mes messages étaient parfaitement sincères, très éloignés des modèles de lettres de motivation qu'on trouve en ligne. J'avais fait mes recherches sur ces organisations et j'ai soigneusement détaillé mes motivations ainsi que les compétences que je pouvais leur apporter.
En repensant à ma stratégie d'acquisition de missions Freelance, je constate qu'elle ressemble étonnamment à ma façon d'obtenir mes CDI durant ma carrière :
- J'ai répondu à une annonce d'emploi
- J'ai répondu à une annonce d'emploi (Jobboard : Lolix)
- Une amie proche m'a contacté pour une mission
- Un ami proche m'a contacté pour un emploi
- Une amie proche m'a contactée pour un emploi
- J'ai ciblé une organisation en contactant une connaissance d'une communauté
- J'ai lancé une bouteille à la mer à une connaissance d'une communauté
- J'ai eu une proposition autour d'une bière alors que je n'avais rien prévu
- J'ai lancé une bouteille à la mer à une connaissance d'une communauté
Voir aussi : Bilan de mon temps de travail de ma première année de Freelance
Dernière page.