
GitOps
Autre article intéressant au sujet de GitOps par Quentin Joly : https://une-tasse-de.cafe/blog/argocd/
Journaux liées à cette note :
J'ai créé fedora-rpm-copr-playground pour apprendre à publier des packages RPM sur Fedora COPR
Introduction
Après trois ans à repousser ce projet, je me suis enfin lancé en janvier 2026 dans la création de paquets RPM pour Fedora COPR.
J'ai créé et publié les packages aichat-git (repository) et text-to-audio (repository). L'expérience a été beaucoup plus simple et rapide que je le pensais. Les agents IA simplifient certes ce genre de tâche, mais même sans eux, le code reste plutôt minimaliste.
Pourquoi est-ce que je me suis intéressé à ce sujet ? Au départ, c'était pour distribuer qemu-compose sous forme de package RPM (voir issue).
Pour bien maîtriser ces opérations, la semaine dernière, je suis reparti de zéro et j'ai implémenté et publié le playground : fedora-rpm-copr-playground. Voici les objectifs de ce playground :
- Générer un package pour distribuer un simple script Bash qui affiche un "Hello world" (dans la branche
bash). - Générer un package pour distribuer une application Golang qui affiche un "Hello world" (dans la branche
golang)
Pour chacun de ces packages, j'ai testé trois méthodes de build :
- build du package RPM 100% local
- build du package SRPM en local, puis upload sur Fedora COPR qui génère les RPM pour plusieurs plateformes et architectures (x86_64, aarch64, etc.)
- une méthode basée à 100% sur Fedora COPR à partir des sources d'un dépôt GitHub, déclenchée automatiquement par un script GitHub Actions
Cette note documente ce playground et rassemble les difficultés que j'ai rencontrées. Le README.md reste consultable si vous préférez suivre un exemple pas à pas.
Le fichier .spec
Le point central pour créer un package RPM est le fichier .spec /rpm/hello-bash.spec :
#
Name: hello-bash
Version: 1.0.7
Release: 1%{?dist}
Summary: A simple Hello World bash script
License: MIT
URL: https://github.com/stephane-klein/fedora-rpm-copr-playground
Source0: hello-bash
BuildArch: noarch
%description
A simple "Hello World" Bash script packaged as an RPM for Fedora COPR.
%prep
# Nothing to prepare, source is ready
%build
# Nothing to build, it's a bash script
%install
mkdir -p %{buildroot}/%{_bindir}
cp %{SOURCE0} %{buildroot}/%{_bindir}/hello-bash
chmod 755 %{buildroot}/%{_bindir}/hello-bash
%files
%{_bindir}/hello-bash
%changelog
* Thu Mar 19 2026 Stéphane Klein <contact@stephane-klein.info> - 1.0.0-1
- Initial release
Les lignes importantes dans ce fichier :
BuildArch: noarch, étant donnée que c'est un simple script, ce package n'est pas dépendant de l'architecture (processeur).- La section
%install - La section
%files
La syntaxe du format .spec peut sembler étrange en 2026. Elle date de 1995 — avant même l'existence de YAML (2001) et JSON (1999). Cette ancienneté explique les %... et %{...} qui peuvent paraitre cryptiques aujourd'hui.
Historiquement, le champ Source0 pointe vers une archive (généralement un tar.gz), contenant les sources du projet. Pour des cas simples, comme ici avec le script Bash, Source0 peut directement référencer le fichier source.
J'ai aussi implémenté une variante bash-multifiles dans le playground, pour tester le packaging de plusieurs scripts accompagnés d'un fichier de documentation. J'y indique les fichiers via Source0:, Source1:, Source2:, puis je les copie dans %install avec %{SOURCE0}, %{SOURCE1}, %{SOURCE2}. Cela fonctionne correctement, bien qu'au-delà de trois ou quatre fichiers, je pense qu'il soit probablement plus pratique d'utiliser une archive.
Build local du package RPM
Le script /build.sh suivant permet de générer un package RPM :
#!/bin/bash
set -e
TOPDIR="$(pwd)/rpmbuild"
mkdir -p "$TOPDIR"/{BUILD,RPMS,SRPMS,SOURCES,SPECS}
echo "Copying source to SOURCES..."
cp hello-bash "$TOPDIR/SOURCES/"
echo "Building RPM..."
rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-bash.spec
echo ""
echo "Build complete!"
echo "RPM: $TOPDIR/RPMS/noarch/"
Il commence par préparer la structure de dossier suivante :
/rpmbuild/
├── BUILD
├── RPMS
├── SOURCES
├── SPECS
└── SRPMS
Ensuite les fichiers à packager sont copiés dans rpmbuild/SOURCES
/rpmbuild/
├── BUILD
├── RPMS
├── SOURCES
│ ├── hello-bash
├── SPECS
└── SRPMS
Pour finir, la commande rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-bash.spec génère à la fois le package SRPM (source RPM) et le RPM binaire. L'option -ba signifie "build all". Pour générer uniquement le SRPM, il faudrait utiliser -bs (build source). Ici, comme le package contient un script Bash, il est de type noarch :
/rpmbuild/
├── BUILD
├── RPMS
│ └── noarch
│ └── hello-bash-1.0.7-1.fc42.noarch.rpm
├── SOURCES
│ ├── hello-bash
├── SPECS
└── SRPMS
└── hello-bash-1.0.7-1.fc42.src.rpm
Publication sur Fedora COPR
Le playground contient un second script qui permet de publier le package sur Fedora COPR, ce qui permet de rendre accessible publiquement son package.
Voici comment cette méthode fonctionne. Tout d'abord, il faut créer un compte et un projet sur Fedora COPR. Dans le playground, j'ai implémenté le script init-copr-project.sh basé sur copr-cli, qui me permet d'automatiser la création du projet (paradigme GitOps).
$ copr-cli create "hello-bash" \
--description "A simple Hello World Bash script packaged as an RPM (auto-build on tags)" \
--chroot fedora-42-x86_64 \
--chroot fedora-43-x86_64 \
--chroot fedora-44-x86_64
Dans cet exemple, je demande à COPR de builder les packages du projet pour les distributions fedora-42-x86_64, fedora-43-x86_64, fedora-44-x86_64.
Après avoir configuré le projet COPR, je lance le script /build-copr.sh qui exécute :
copr-cli build "hello-bash" /rpmbuild/SRPMS/hello-bash-1.0.6-1.fc42.src.rpm
Le premier paramètre "hello-bash" est le nom du projet et le second est le package source SRPM préalablement construit localement par le script /build.sh.
Voici ce que donne l'exécution de ./build-copr.sh côté cli :
$ ./build-copr.sh
...
Build complete!
RPM: /home/stephane/git/github.com/stephane-klein/fedora-rpm-copr-playground/.worktree/bash/rpmbuild/RPMS/noarch/
Uploading package ./rpmbuild/SRPMS/hello-bash-1.0.6-1.fc42.src.rpm
|################################| 8.5 kB 47.1 kB/s eta 0:00:00
Build was added to hello-bash:
https://copr.fedorainfracloud.org/coprs/build/10252699
Created builds: 10252699
Watching build(s): (this may be safely interrupted)
08:59:15 Build 10252699: pending
08:59:45 Build 10252699: running
09:00:15 Build 10252699: starting
09:00:46 Build 10252699: running
Voici ce qui est visible sur l'interface web de COPR, https://copr.fedorainfracloud.org/coprs/stephaneklein/hello-bash/builds/ :
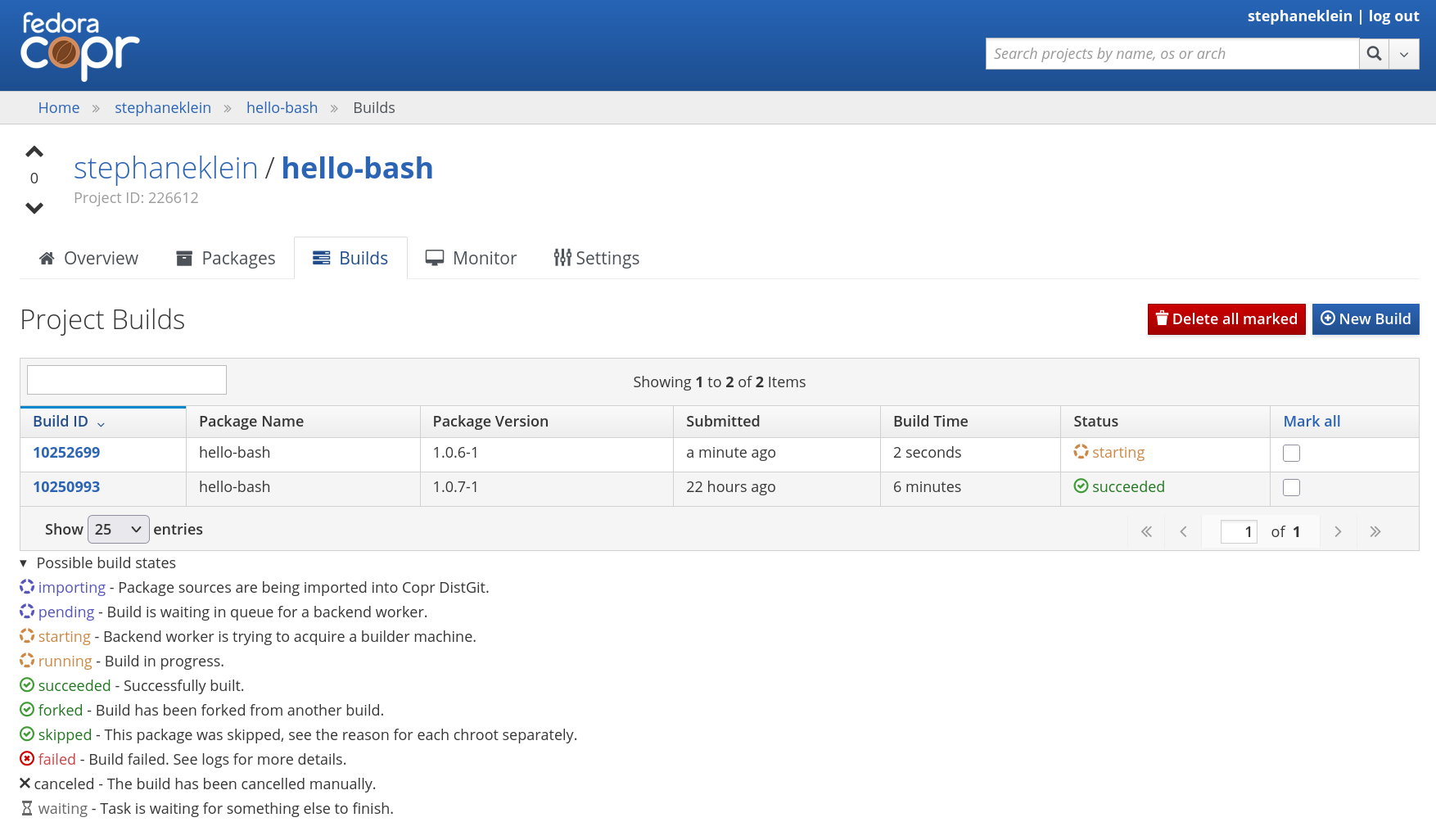
Une fois le build des packages terminé, il est facile d'installer le package avec les commandes suivantes :
$ sudo dnf copr enable -y stephaneklein/hello-bash
$ sudo dnf install -y hello-bash
$ hello-bash
Hello World
Automatisation GitOps avec COPR
Et pour finir, j'ai implémenté dans le playground l'automatisation complète de la compilation et publication des packages sur l'infrastructure COPR.
Pour cela, dans le script init-copr-project.sh j'ai déclaré l'URL du repository qui contient le code source :
...
copr-cli add-package-scm "$COPR_PROJECT" \
--name hello-bash \
--clone-url https://github.com/stephane-klein/fedora-rpm-copr-playground.git \
--commit bash \
--subdir . \
--spec rpm/hello-bash.spec \
--type git \
--method make_srpm \
--webhook-rebuild on
Le paramètre --commit bash permet de définir la branche Git à utiliser comme source.
Le paramètre --method make_srpm, qui permet à l'utilisateur d'utiliser un script personnalisé de génération du SRPM, à placer dans /.copr/Makefile à la racine du dépôt avec une cible srpm, exemple :
specfile = rpm/hello-bash.spec
.PHONY: srpm
srpm: $(specfile)
mkdir -p /tmp/copr-srpm-build
cp rpm/hello-bash.spec /tmp/copr-srpm-build/hello-bash.spec
cp -r . /tmp/copr-srpm-build/source/
cd /tmp/copr-srpm-build && \
rpmbuild -bs hello-bash.spec \
--define "_topdir /tmp/copr-srpm-build/rpmbuild" \
--define "dist .fc42" \
--define "_sourcedir /tmp/copr-srpm-build/source"
cp /tmp/copr-srpm-build/rpmbuild/SRPMS/*.src.rpm $(outdir)
Je ne souhaite pas détailler ici d'autres méthodes comme tito ou Packit, mais la méthode make_srpm est la plus flexible, elle permet de contrôler entièrement comment le SRPM est construit.
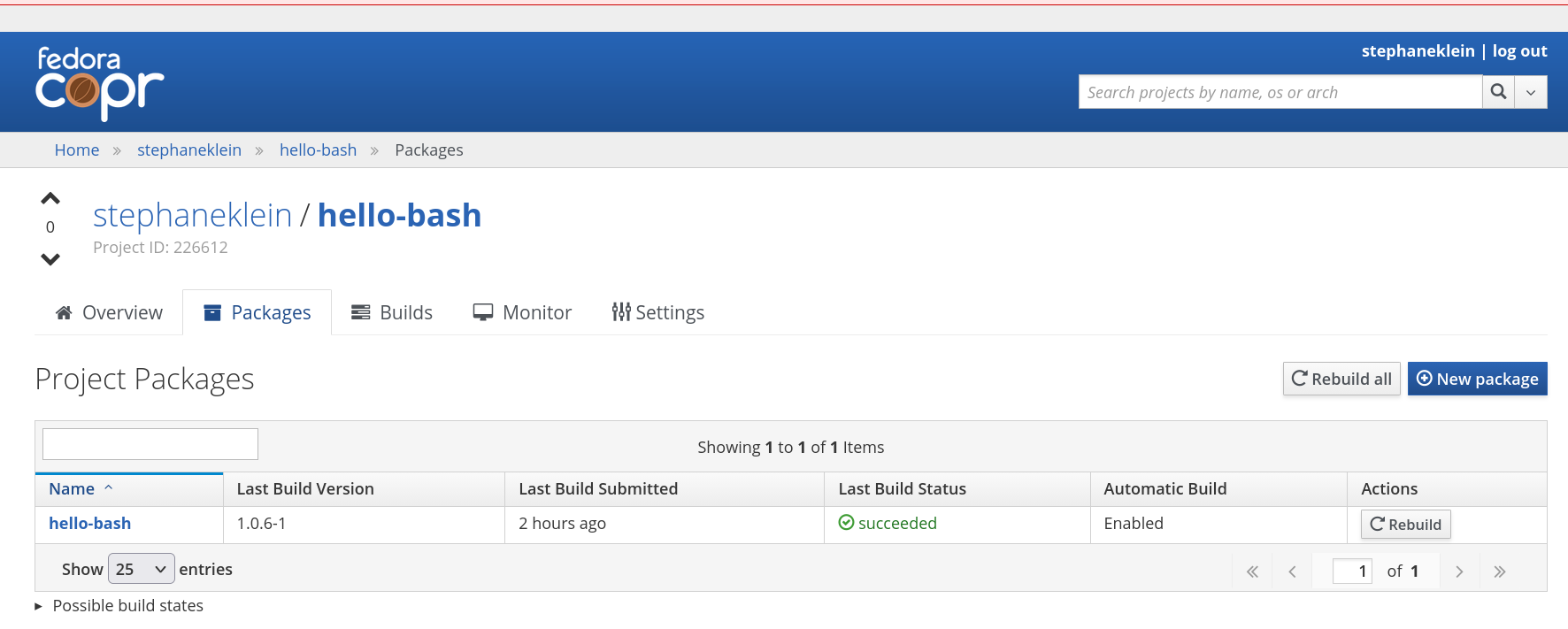
Une fois tout ceci configuré, il est possible de rebuild le package directement en cliquant sur le bouton "Rebuild" sur l'interface web de COPR :
Dernière étape : j'ai implémenté un build automatique qui est déclenchée par un appel curl dans le job GitHub Actions /.github/workflows/trigger-copr-build.yml, dont voici le contenu :
name: Trigger Copr Build
on:
push:
tags:
- '*'
jobs:
trigger-copr-build:
runs-on: ubuntu-latest
steps:
- uses: actions/checkout@v4
with:
fetch-depth: 0
- name: Verify tag is on bash branch
run: |
if ! git branch -r --contains ${{ github.ref_name }} | grep -q "origin/bash"; then
echo "Tag ${{ github.ref_name }} is not on branch bash"
exit 1
fi
- name: Trigger Copr webhook
run: |
curl -X POST https://copr.fedorainfracloud.org/webhooks/custom/226325/3cf20247-820b-4050-bfb1-593b01a6996f/hello-bash/
Ce job est exécuté à chaque publication d'un nouveau Git tag, suivi d'une vérification que le tag provient bien de la branche bash.
Claude Sonnet 4.6 m'a suggéré l'existence d'une méthode de polling de dépôt Git intégrée à COPR, mais je n'ai trouvé aucune trace de celle-ci dans la documentation.
J'ai aussi essayé d'utiliser la méthode basée sur les webhooks GitHub de COPR, mais je n'ai pas réussi à la faire fonctionner. L'interface de GitHub m'indiquait à chaque fois une erreur dans la réponse des calls HTTP. C'est pour cela que j'ai fini par déclencher le webhook custom via un job GitHub Actions.
Package d'un projet en Golang
Le playground contient aussi le packaging d'une application en Golang, consultable dans la branche golang.
Voici le contenu du fichier /golang/rpm/hello-golang.spec :
Name: hello-golang
Version: 1.0.10
Release: 1%{?dist}
Summary: A simple Hello World Go application
License: MIT
URL: https://github.com/stephane-klein/fedora-rpm-copr-playground
Source0: %{name}-%{version}.tar.gz
BuildRequires: golang >= 1.21
%description
A simple "Hello World" Go application packaged as an RPM for Fedora COPR.
%prep
%autosetup
%build
go build -ldflags "-X main.version=%{version}" -o %{name}
%install
mkdir -p %{buildroot}%{_bindir}
cp %{name} %{buildroot}%{_bindir}/
%files
%{_bindir}/%{name}
%changelog
* Fri Mar 20 2026 Stéphane Klein <contact@stephane-klein.info> - 1.0.0-1
- Initial release
Les principales différences avec la version pour Bash :
- Absence de
BuildArch: noarch - Présence de
BuildRequires: golang >= 1.21 - Et l'ajout des instructions suivantes :
%prep
%autosetup
%build
go build -ldflags "-X main.version=%{version}" -o %{name}
Peu de changement au niveau du script /build-rpm-locally.sh, qui génère ces fichiers :
rpmbuild
├── BUILD
├── RPMS
│ └── x86_64
│ ├── hello-golang-1.0.10-1.fc42.x86_64.rpm
│ ├── hello-golang-debuginfo-1.0.10-1.fc42.x86_64.rpm
│ └── hello-golang-debugsource-1.0.10-1.fc42.x86_64.rpm
├── SOURCES
│ ├── hello-golang-1.0.10
│ │ ├── go.mod
│ │ └── main.go
│ └── hello-golang-1.0.10.tar.gz
├── SPECS
└── SRPMS
└── hello-golang-1.0.10-1.fc42.src.rpm
Cette fois, plus rien dans le dossier RPMS/noarch/, la commande rpmbuild --define "_topdir $TOPDIR" -ba rpm/hello-golang.spec build le package pour la distribution de la workstation du développeur.
Pour le reste, je n'ai pas identifié de différence majeure entre la version Bash et la version Golang
La suite… méthode Tito et Packit
Pour être tout à fait transparent, en rédigeant cette note, j'ai découvert les méthodes tito et Packit.
Je compte mettre à jour stephane-klein/fedora-rpm-copr-playground pour les tester et ensuite publier une nouvelle note de compte rendu.
Comment tu déploies tes containers Docker en production sans Kubernetes ?
Début novembre un ami me posait la question :
Quand tu déploies des conteneurs en prod, sans k8s, tu fais comment ?
Après 3 mois d'attente, voici ma réponse 🙂.
Mon contexte
Tout d'abord, un peu de contexte. Cela fait 25 ans que je travaille sur des projets web, et tous les projets sur lesquels j'ai travaillé pouvaient être hébergés sur un seul et unique serveur baremetal ou une Virtual machine, sans jamais nécessiter de scalabilité horizontale.
Je n'ai jamais eu besoin de serveurs avec plus de 96Go de RAM pour faire tourner un service en production. Il convient de noter que, dans 80% des cas, 8 Go ou 16 Go étaient largement suffisants.
Cela dit, j'ai également eu à gérer des infrastructures comportant plusieurs serveurs : 10, 20, 30 serveurs. Ces serveurs étaient généralement utilisés pour héberger une infrastructure de soutien (Platform infrastructure) à destination des développeurs. Par exemple :
- Environnements de recettage
- Serveurs pour faire tourner Gitlab-Runner
- Sauvegarde des données
- Etc.
Ce contexte montre que je n'ai jamais eu à gérer le déploiement de services à très forte charge, comme ceux que l'on trouve sur des plateformes telles que Deezer, le site des impôts, Radio France, Meetic, la Fnac, Cdiscount, France Travail, Blablacar, ou encore Doctolib. La méthode que je décris dans cette note ne concerne pas ce type d'infrastructure.
Ma méthode depuis 2015
Dans cette note, je ne vais pas retracer l'évolution complète de mes méthodes de déploiement, mais plutôt me concentrer sur deux d'entre elles : l'une que j'utilise depuis 2015, et une déclinaison adoptée en 2020.
Voici les principes que j'essaie de suivre et qui constituent le socle de ma doctrine en matière de déploiement de services :
- Je m'efforce de suivre le modèle Baking autant que possible (voir ma note 2025-02-07_1403), sans en faire une approche dogmatique ou extrémiste.
- J'applique les principes de The Twelve-Factors App.
- Je privilégie le paradigme Remote Task Execution, ce qui me permet d'adopter une approche GitOps.
- J'utilise des outils d'orchestration prenant en charge le mode push (voir note 2025-02-07_1612), comme Ansible, et j'évite le mode pull.
En pratique, j'utilise Ansible pour déployer un fichier docker-compose.yml sur le serveur de production et ensuite lancer les services.
Je précise que cette note ne traite pas de la préparation préalable du serveur, de l'installation de Docker, ni d'autres aspects similaires. Afin de ne pas alourdir davantage cette note, je n'aborde pas non plus les questions de Continuous Integration ou de Continuous Delivery.
Imaginons que je souhaite déployer le lecteur RSS Miniflux connecté à un serveur PostgreSQL.
Voici les opérations effectuées par le rôle Ansible à distance sur le serveur de production :
-
- Création d'un dossier
/srv/miniflux/
- Création d'un dossier
-
- Upload de
/srv/miniflux/docker-compose.ymlavec le contenu suivant :
- Upload de
services:
postgres:
image: postgres:17
restart: unless-stopped
environment:
POSTGRES_DB: miniflux
POSTGRES_USER: miniflux
POSTGRES_PASSWORD: password
volumes:
- postgres:/var/lib/postgresql/data/
healthcheck:
test: ['CMD', 'pg_isready']
interval: 10s
start_period: 30s
miniflux:
image: miniflux/miniflux:2.2.5
ports:
- 8080:8080
environment:
DATABASE_URL: postgres://miniflux:password@postgres/miniflux?sslmode=disable
RUN_MIGRATIONS: 1
CREATE_ADMIN: 1
ADMIN_USERNAME: johndoe
ADMIN_PASSWORD: secret
healthcheck:
test: ["CMD", "/usr/bin/miniflux", "-healthcheck", "auto"]
depends_on:
postgres:
condition: service_healthy
volumes:
postgres:
name: miniflux_postgres
-
- Depuis le dossier
/srv/miniflux/lancement de la commandedocker compose up -d --remove-orphans --wait --pull always
- Depuis le dossier
Voilà, c'est tout 🙂.
En 2020, j'enlève "une couche"
J'aime enlever des couches et en 2020, je me suis demandé si je pouvais pratiquer avec élégance la méthode Remote Execution sans Ansible.
Mon objectif était d'utiliser seulement ssh et un soupçon de Bash.
Voici le résultat de mes expérimentations.
J'ai besoin de deux fichiers.
_payload_deploy_miniflux.shdeploy_miniflux.sh
Voici le contenu de _payload_deploy_miniflux.sh :
#!/usr/bin/env bash
set -e
PROJECT_FOLDER="/srv/miniflux/"
mkdir -p ${PROJECT_FOLDER}
cat <<EOF > ${PROJECT_FOLDER}docker-compose.yaml
services:
postgres:
image: postgres:17
restart: unless-stopped
environment:
POSTGRES_DB: miniflux
POSTGRES_USER: miniflux
POSTGRES_PASSWORD: {{ .Env.MINIFLUX_POSTGRES_PASSWORD }}
volumes:
- postgres:/var/lib/postgresql/data/
healthcheck:
test: ['CMD', 'pg_isready']
interval: 10s
start_period: 30s
miniflux:
image: miniflux/miniflux:2.2.5
ports:
- 8080:8080
environment:
DATABASE_URL: postgres://miniflux:{{ .Env.MINIFLUX_POSTGRES_PASSWORD }}@postgres/miniflux?sslmode=disable
RUN_MIGRATIONS: 1
CREATE_ADMIN: 1
ADMIN_USERNAME: johndoe
ADMIN_PASSWORD: {{ .Env.MINIFLUX_ADMIN_PASSWORD }}
healthcheck:
test: ["CMD", "/usr/bin/miniflux", "-healthcheck", "auto"]
depends_on:
postgres:
condition: service_healthy
volumes:
postgres:
name: miniflux_postgres
EOF
cd ${PROJECT_FOLDER}
docker compose pull
docker compose up -d --remove-orphans --wait
Voici le contenu de deploy_miniflux.sh :
#!/usr/bin/env bash
set -e
cd "$(dirname "$0")/../"
gomplate -f _payload_deploy_miniflux.sh | ssh root@$SERVER1_IP 'bash -s'
J'utilise gomplate pour remplacer dynamiquement les secrets dans le script _payload_deploy_miniflux.sh.
En conclusion, pour déployer une nouvelle version, j'ai juste à exécuter :
$ ./deploy_miniflux.sh
Je trouve cela minimaliste et de plus, l'exécution est bien plus rapide que la solution Ansible.
Ce type de script peut ensuite être exécuté aussi bien manuellement par un développeur depuis sa workstation, que via GitLab-CI ou même Rundeck.
Pour un exemple plus détaillé, consultez ce repository : https://github.com/stephane-klein/poc-bash-ssh-docker-deployement-example
Bien entendu, si vous souhaitez déployer votre propre application que vous développez, vous devez ajouter à cela la partie baking, c'est-à-dire, le docker build qui prépare votre image, l'uploader sur un Docker registry… Généralement je réalise cela avec GitLab-CI/CD ou GitHub Actions.
Objections
Certains DevOps me disent :
- « Mais on ne fait pas ça pour de la production ! Il faut utiliser Kubernetes ! »
- « Comment ! Tu n'utilises pas Kubernetes ? »
Et d'autres :
- « Il ne faut au grand jamais utiliser
docker-composeen production ! »
Ne jamais utiliser docker compose en production ?
J'ai reçu cette objection en 2018. J'ai essayé de comprendre les raisons qui justifiaient que ce développeur considère l'usage de docker compose en production comme un Antipattern.
Si mes souvenirs sont bons, je me souviens que pour lui, la bonne méthode conscistait à déclarer les états des containers à déployer avec le module Ansible docker_container (le lien est vers la version de 2018, depuis ce module s'est grandement amélioré).
Je n'ai pas eu plus d'explications 🙁.
J'ai essayé d'imaginer ses motivations.
J'en ai trouvé une que je ne trouve pas très pertinente :
- Uplodaer un fichier
docker-compose.ymlen production pour ensuite lancer des fonctions distantes sur celui-ci est moins performant que manipulerdocker-engineà distance.
J'en ai imaginé une valable :
- En déclarant la configuration de services Docker uniquement dans le rôle Ansible cela garantit qu'aucun développeur n'ira modifier et manipuler directement le fichier
docker-compose.ymlsur le serveur de production.
Je trouve que c'est un très bon argument 👍️.
Cependant, cette méthode a à mes yeux les inconvénients suivants :
- Je maitrise bien mieux la syntaxe de docker compose que la syntaxe du module Ansible community.docker.docker_container
- J'utilise docker compose au quotidien sur ma workstation et je n'ai pas envie d'apprendre une syntaxe supplémentaire uniquement pour le déploiement.
- Je pense que le nombre de développeurs qui maîtrisent docker compose est suppérieur au nombre de ceux qui maîtrisent le module Ansible
community.docker.docker_container. - Je ne suis pas utilisateur maximaliste de la méthode Remote Execution. Dans certaines circonstances, je trouve très pratique de pouvoir manipuler docker compose dans une session ssh directement sur un serveur. En période de stress ou de debug compliqué, je trouve cela pratique. J'essaie d'être assez rigoureux pour ne pas oublier de reporter mes changements effectués directement le serveur dans les scripts de déploiements (configuration as code).
Tu dois utiliser Kubernetes !
Alors oui, il y a une multitude de raisons valables d'utiliser Kubernetes. C'est une technologie très puissante, je n'ai pas le moindre doute à ce sujet.
J'ai une expérience dans ce domaine, ayant utilisé Kubernetes presque quotidiennement dans un cadre professionnel de janvier 2016 à septembre 2017. J'ai administré un petit cluster auto-managé composé de quelques nœuds et y ai déployé diverses applications.
Ceci étant dit, je rappelle mon contexte :
Cela fait 25 ans que je travaille sur des projets web, et tous les projets sur lesquels j'ai travaillé pouvaient être hébergés sur un seul et unique serveur baremetal ou une Virtual machine, sans jamais nécessiter de scalabilité horizontale.
Je n'ai jamais eu besoin de serveurs avec plus de 96Go de RAM pour faire tourner un service en production. Il convient de noter que, dans 80% des cas, 8 Go ou 16 Go étaient largement suffisants.
Je pense que faire appel à Kubernetes dans ce contexte est de l'overengineering.
Je dois avouer que j'envisage d'expérimenter un usage minimaliste de K3s (attention au "3", je n'ai pas écrit k8s) pour mes déploiements. Mais je sais que Kubernetes est un rabbit hole : Helm, Kustomize, Istio, Helmfile, Grafana Tanka… J'ai peur de tomber dans un Yak!.
D'autre part, il existe déjà un pourcentage non négligeable de développeur qui ne maitrise ni Docker, ni docker compose et dans ces conditions, faire le choix de Kubernetes augmenterait encore plus la barrière à l'entrée permettant à des collègues de pouvoir comprendre et intervenir sur les serveurs d'hébergement.
C'est pour cela que ma doctrine d'artisan développeur consiste à utiliser Kubernetes seulement à partir du moment où je rencontre des besoins de forte charge, de scalabilité.
Journal du lundi 09 septembre 2024 à 15:59
Dans cette note, je souhaite présenter ma doctrine de mise à jour d'OS de serveurs.
Je ne traiterai pas ici de la stratégie d'upgrade pour un Cluster Kubernetes.
La mise à jour d'un serveur, par exemple, sous un OS Ubuntu LTS, peut être effectuée avec les commandes suivantes :
sudo apt upgrade -y- ou
sudo apt dist-upgrade -y(plus risqué) - ou
sudo do-release-upgrade(encore plus risqué)
L'exécution d'un sudo apt upgrade -y peut :
- Installer une mise à jour de docker, entraînant une interruption des services sur ce serveur de quelques secondes à quelques minutes.
- Installer une mise à jour de sécurité du kernel, nécessitant alors un redémarrage du serveur, ce qui entraînera une coupure de quelques minutes.
Une montée de version de l'OS via sudo do-release-upgrade peut prendre encore plus de temps et impliquer des ajustements supplémentaires.
Bien que ces opérations se déroulent généralement sans encombre, il n'y a jamais de certitude totale, comme l'illustre l'exemple de la Panne informatique mondiale de juillet 2024.
Sachant cela, avant d'effectuer la mise à jour d'un serveur, j'essaie de déterminer quelles seraient les conséquences d'une coupure d'une journée de ce serveur.
Si je considère que ce risque de coupure est inacceptable ou ne serait pas accepté, j'applique alors la méthode suivante pour réaliser mon upgrade.
Je n'effectue pas la mise à jour le serveur existant. À la place, je déploie un nouveau serveur en utilisant mes scripts automatisés d'Infrastructure as code / GitOps.
C'est pourquoi je préfère éviter de nommer les serveurs d'après le service spécifique qu'ils hébergent (voir aussi Pets vs Cattle). Par exemple, au lieu de nommer un serveur gitlab.servers.example.com, je vais le nommer server1.servers.example.com et configurer gitlab.servers.example.com pour pointer vers server1.servers.example.com.
Ainsi, en cas de mise à jour de server1.servers.example.com, je crée un nouveau serveur nommé server(n+1).servers.example.com.
Ensuite, je lance les scripts de déploiement des services qui étaient présents sur server1.servers.example.com.
Idéalement, j'utilise mes scripts de restauration des données depuis les sauvegardes des services de server1.servers.example.com, ce qui me permet de vérifier leur bon fonctionnement.
Ensuite, je prépare des scripts rsync pour synchroniser rapidement les volumes entre server1.servers.example.com et server(n+1).servers.example.com.
Je teste que tout fonctionne bien sur server(n+1).servers.example.com.
Si tout fonctionne correctement, alors :
- J'arrête les services sur
server(n+1).servers.example.com; - J'exécute le script de synchronisation
rsyncdeserver1.servers.example.comversserver(n+1).servers.example.com; - Je relance les services sur
server(n+1).servers.example.com - Je modifie la configuration DNS pour faire pointer les services de
server1.servers.example.comversserver(n+1).servers.example.com - Quelques jours après cette intervention, je décommissionne
server1.servers.example.com.
Cette méthode est plus longue et plus complexe qu'une mise à jour directe de l'OS sur le server1.servers.example.com, mais elle présente plusieurs avantages :
- Une grande sécurité ;
- L'opération peut être faite tranquillement, sans stress, avec de la qualité ;
- Une durée de coupure limitée et maîtrisée ;
- La possibilité de confier la tâche en toute sécurité à un nouveau DevOps ;
- La garantie du bon fonctionnement des scripts de déploiement automatisé ;
- La vérification de l'efficacité des scripts de restauration des sauvegardes ;
- Un test concret des scripts et de la documentation du Plan de reprise d'activité.
Si le serveur à mettre à jour fonctionne sur une Virtual instance, il est également possible de cloner la VM et de tester la mise à niveau. Cependant, je préfère éviter cette méthode, car elle ne permet pas de valider l'efficacité des scripts de déploiement.